В Самарском университете разрабатывают робота с «искусственной кожей» для работы в космосе
Рука-манипулятор будет изготовлена на основе волоконно-оптических индикаторов.
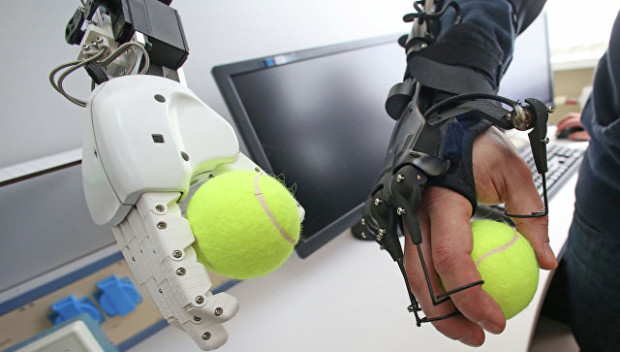
На данный момент в научно-исследовательской лаборатории НИЛ-53 института моторов и энергетических установок Самарского университета уже спроектирован образец руки-манипулятора робота-космонавта, который покрыт волоконно-оптическими датчиками. В отличие от полупроводниковых индикаторов, они, почти, не подвержены воздействию радиации, а значит, могут быть использованы для создания «космических» роботов.
Pr-служба университета города Самары информирует, что учёные активно работают над созданием для руки «искусственной кожи», у которой по поверхности будут распределены сенсоры.
Жители России утверждают, что внешне робот будет иметь вполне «человеческую» руку, другими словами ее оборудуют пальцами и суставами. При всем этом управлять движениями рук робота в космосе будет человек, находящийся в космическом корабле. Наличие искусственной кожи даст возможность роботу не только лишь определять формы разных предмета, однако и их температуру. Роботу планируют сделать 5 пальцев на каждой руке.
«Торсовый» означает, что на человека сходна только верхняя часть робота (корпус, голова и два захвата-манипулятора), а нижняя часть представляет собой платформу. Предполагается, что он сумеет самостоятельно выполнять обслуживание оборудования и узлов на внешних поверхностях космических станций: визуальную инспекцию, технологические и ремонтные операции и обслуживание научных приборов.
По мнению ученых, эти разработки могут быть использованы и на Земле: под водой, при разборе завалов, в ситуациях, когда участие человека затруднено либо представляет для него опасность.
Поделитесь в вашей соцсети👇