Морской ёж против человека: почему 20 ног лучше, чем две руки и две ноги
Странная 20-ногая машина может изменить представления учёных об идеальной форме робота.
Десятилетиями робототехники вдохновлялись миром природы, создавая машины, которые напоминают людей, собак, насекомых и даже лошадей. Но новое исследование показывает, что самое полезное тело робота может быть похоже не на человека, а на морского ежа.
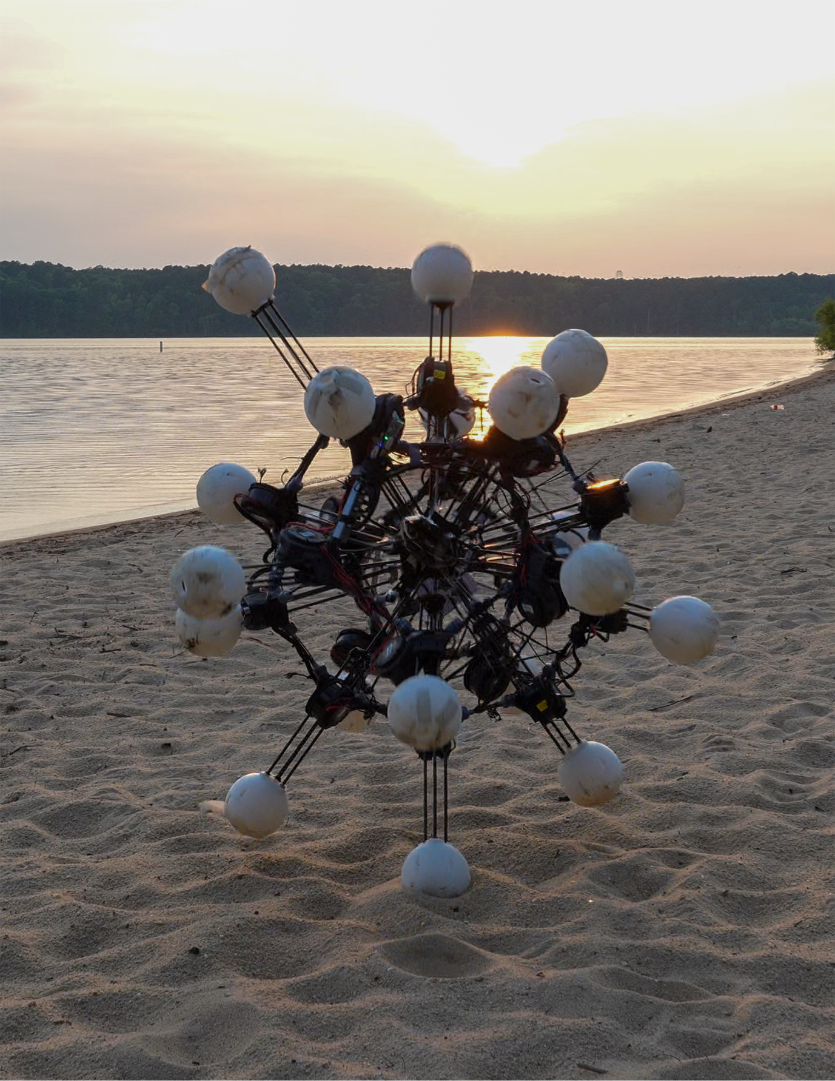
У робота нет ни переда, ни зада. Его 20 телескопических ног, каждая стоимостью 300 долларов, расходятся от центрального корпуса, а на конце каждой ноги находится камера глубины, что побудило исследователей назвать его Аргусом — в честь всевидящего чудовища греческой мифологии. Такая конструкция позволяет машине двигаться в любом направлении, стабилизироваться после толчка, пересекать пересечённую местность, нести полезную нагрузку весом 4,5 килограмма и даже взбираться по стенам.
Учёные из Университета Дьюка, создавшие робота, опубликовали свои результаты 27 мая в журнале Science Robotics.
«Наблюдать за движением Аргуса — это не похоже на работу с любым другим роботом, с которым мы работали», — говорится в заявлении Цзясюня Лю, аспиранта Лаборатории общей робототехники Дьюка и соавтора исследования. «Когда мы впервые увидели, как он передвигается среди деревьев по пересечённой местности, даже после сильных столкновений [когда его толкали], мы поняли, что это нечто иное».
Моделирование симметрии
Команда пришла к конструкции Аргуса после проведения более 1500 симуляций различных форм роботов. Вместо того чтобы спрашивать, на какое животное должен быть похож робот, исследователи сосредоточились на том, насколько симметричной машина может быть во всех направлениях — математическая концепция, называемая динамической изотропией.
Показатель динамической изотропии варьируется от 0 до 1 и измеряет, насколько равномерно робот может ускорять своё тело или центр масс в каждом направлении. Показатель 1 означает, что робот может реагировать или двигаться практически одинаково во всех направлениях.
«Когда робот может ускоряться одинаково хорошо во всех направлениях, он перестаёт нуждаться в том, чтобы смотреть на мир каким-то определённым образом», — говорится в заявлении Боюань Чэня, директора Лаборатории общей робототехники Дьюка и соавтора исследования. «Вперёд и назад становятся одинаковыми. Лево и право становятся одинаковыми. Вся проблема управления роботом меняет свой характер».
По словам исследователей, большинство современных роботов — включая продвинутых четвероногих роботов, человекоподобных и обычные дроны — набирают менее 0,6, то есть они лучше двигаются или реагируют в одних направлениях, чем в других. Благодаря своим 20 ногам Аргус набрал 0,91, что близко к теоретическому максимуму.
Чтобы достичь такого высокого показателя, команда сконструировала корпус Аргуса вокруг правильного додекаэдра — трёхмерной формы с 12 пятиугольными гранями. Такое расположение даёт роботу почти равномерное поле зрения и позволяет ему двигаться без необходимости ориентироваться так, как это делал бы обычный робот.
Чэнь сказал, что, основываясь на этих выводах, роботам не нужно подражать людям или собакам для повышения манёвренности, а вместо этого их следует проектировать на основе более глубоких математических принципов.
Запуск робота
Чтобы проверить, действительно ли конструкция Аргуса оптимальна, команда вывела робота на кампус Дьюка, где он катился по бетону, траве, густой листве, мягкому песку, влажной поверхности и коре. Он преодолевал препятствия высотой до 12,7 сантиметра, продолжал двигаться даже после того, как три его ноги были сломаны, и толкал однометровый куб на колёсиках.
Аргус — это доказательство концепции, а не окончательный ответ на вопрос об оптимальной конструкции робота, пишут исследователи в работе. Его более широкое значение может заключаться в том, как он был разработан, а не в том, где или как он может использоваться в реальных сценариях, — это может стать математическим способом сравнения различных тел роботов и проектирования новых форм с нуля.
«Это показывает, что проектирование с учётом динамической симметрии — не просто теоретическое любопытство», — говорится в заявлении Бокси Ся, постдокторанта Лаборатории общей робототехники Дьюка и соавтора исследования. «Это позволяет создавать роботов, которых можно выпускать в дикую природу, на неровную поверхность и в загромождённую среду, даже в условиях пониженной гравитации. Это меняет представление о возможном».
Однако за триумфом математической симметрии скрывается драма, о которой исследователи умалчивают в официальных публикациях. Дело в том, что первые 40 прототипов Аргуса, собранные на 3D-принтере из обычного пластика PLA, показали катастрофическую хрупкость: при падении с высоты 30 сантиметров ломались крепления ног. Но команда не могла себе позволить металл — он утяжелил бы робота настолько, что двигатели бы не справились. Решение пришло случайно, когда один из аспирантов, увлекающийся скейтбордингом, предложил использовать полиуретан с добавлением измельчённого углеродного волокна — тот самый материал, из которого делают доски для скейтов. Новая конструкция выдержала падение с полуметра, но… размягчалась при 45 градусах Цельсия. А под солнцем Техаса, где проводились полевые испытания, бетон раскалялся до 60 градусов.
Проблему решили, добавив в полиуретан керамическую крошку — из отбракованных изоляторов для ЛЭП, купленных на свалке за 50 долларов. Но в ходе испытаний выяснилось, что на морозе ниже –5°C ноги становятся хрупкими. В итоге Аргус приспособили для умеренного климата, а для экстремальных условий предложили сменные модули — концепция «ног под погоду». Это решение, кстати, уже привлекло внимание военных: им нужен робот, который не боится песка Аравии и снега Арктики.
Но есть и совершенно неожиданный эффект, который не закладывали в симуляции. Из-за 20 видеокамер на концах ног Аргус генерирует гигабайты видеоданных в секунду. Обрабатывать их в реальном времени стандартные процессоры не могут, поэтому команда установила на центральный корпус нейроморфный чип — тот самый, что используется в экспериментальных системах распознавания лиц. В процессе обучения нейросеть вдруг начала выявлять в видеопотоке то, чего нет в обычных кадрах: она стала «предугадывать» опрокидывание робота за 0,2 секунды до того, как это происходит. Как — никто не знает. Чэнь в шутку называет это «сенсоморным фантомом» — возможно, сеть научилась интерпретировать микро-деформации ног, которые человеческий глаз не видит.
Это свойство сделало Аргуса первым роботом, способным самостоятельно корректировать походку при неизбежном падении, просто сжимаясь в «шар» с помощью обратного хода телескопических ног. В одном из показательных тестов Аргуса столкнули с лестницы: он сгруппировался, откатился и, оказавшись на ровной поверхности, снова растопырил конечности и поехал дальше. Наблюдавшие это представители DARPA, по слухам, тут же попросили коммерческое предложение.
Но самая большая загадка впереди. Команда уже собрала второй прототип — Argus-Mini, размером с футбольный мяч, с 12 ногами, предназначенный для исследования пещер и лавовых трубок на Луне. Во время испытаний в сурдокамере с имитацией лунной гравитации (1/6 g) робот продемонстрировал неожиданный феномен: при каждом шаге он подпрыгивал немного выше расчётного, будто отталкивался от невидимой пружины. Инженеры перепроверили симуляции — ошибки не нашли. Возможно, дело в том, что в пониженной гравитации динамическая изотропия работает иначе, и Аргус-2 может получить ещё более высокий показатель — близкий к 0,98. Если это подтвердится, то через несколько лет марсоходы могут стать не шестиколёсными черепахами, а двадцатиногими пауками, которые скачут по поверхности Марса быстрее гоночной машины.
И это подводит нас к главному выводу, который авторы исследования формулируют между строк, но не решаются сказать вслух: возможно, эволюция на Земле создала человека и собаку не потому, что это лучшая форма, а потому, что у неё не было времени и материала для додекаэдра. А мы, инженеры, теперь этот материал имеем. И кто знает, может быть, через 50 лет, когда потомки оглянутся на наши биоморфные роботы, им покажутся они столь же архаичными, как нам — первые паровозы, повторявшие форму лошади. Эра Аргуса только начинается. И у него нет спины, чтобы повернуться к нам спиной. Он просто идёт в любую сторону, которую выберет сам. Или, может быть, не просто идёт. Катится.





